本文为研究员 Aditya Asgaonkar 在 EthCC 大会上的演讲幻灯片,据其自述,是为了向智能合约开发者说明 Eth2 的设计方案,以及开发者的开发体验会有什么样的变化。
编者注:本文为研究员 Aditya Asgaonkar 在 EthCC 大会上的演讲幻灯片,据其自述,是为了向智能合约开发者说明 Eth2 的设计方案,以及开发者的开发体验会有什么样的变化。他在演讲中鲜明地勾勒出 Eth2 的基本架构,以及 Eth2 在设计上的挑战。
正文中对幻灯内容的说明和分段,俱为编者所加。


在这一段,作者指出,以太坊 2.0 的两大设计目标是可扩展性和安全性。
前者意味着吞吐量呈超线性增长,若节点资源投入量提升 K 倍,则整个系统的吞吐量增长大于 K 倍。
后者则意味着相应于节点所形成的共识安全性,保证所有部分都是同样安全的。
后者用分片(把整个系统的状态切分开来形成不同的片区)来实现,而前者用信标链来实现。
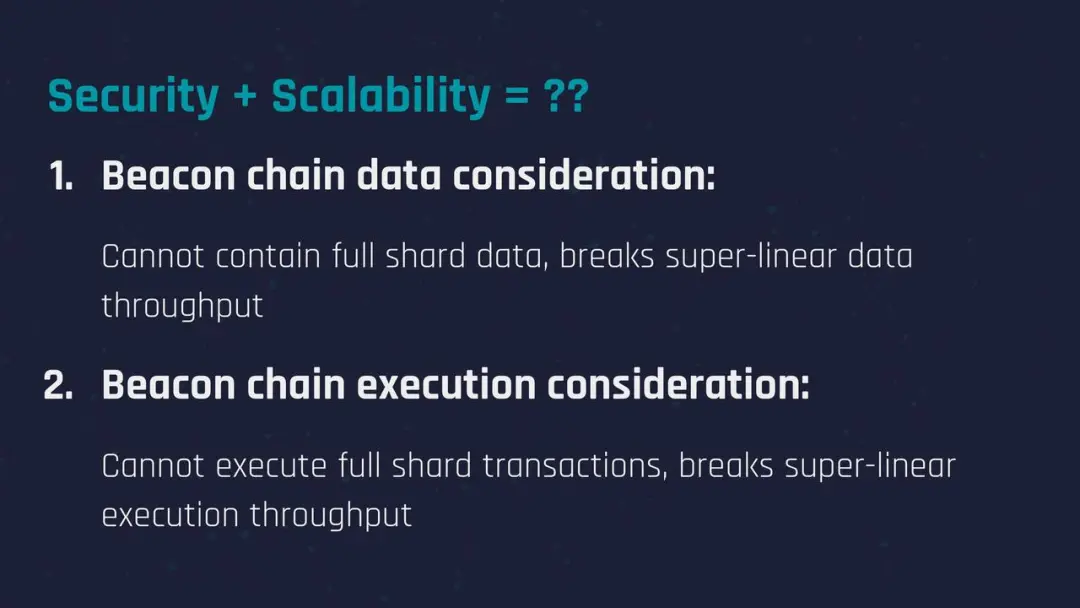
但是两相结合之下,信标链就不能保存所有的分片数据、执行所有的分片交易,否则就会打破可扩展性要求。
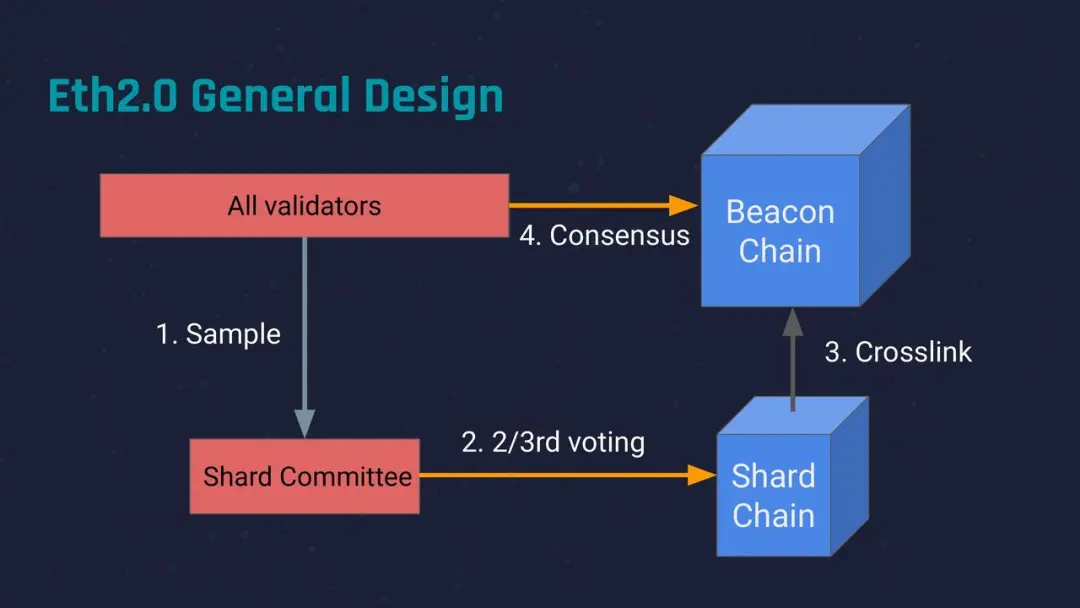
因此,两者的分工是,信标链负责共识、只保存分片状态的默克尔根,而且不执行分片交易;分片则没有任何共识机制,仅有随机抽取的验证者来出块、验证并将默克尔根提交到信标链上。

但这样一来,开发者今天习以为常的东西,在 Eth2.0 里面就不一定现实了,比如:对系统中任意合约的同步调用。因为基本问题是,发起调用时,接受调用的分片不知道有人正在发起跨分片交易,除非信标链里不仅有状态默克尔根值信息,还有别的信息。但这样就会打破可扩展性。
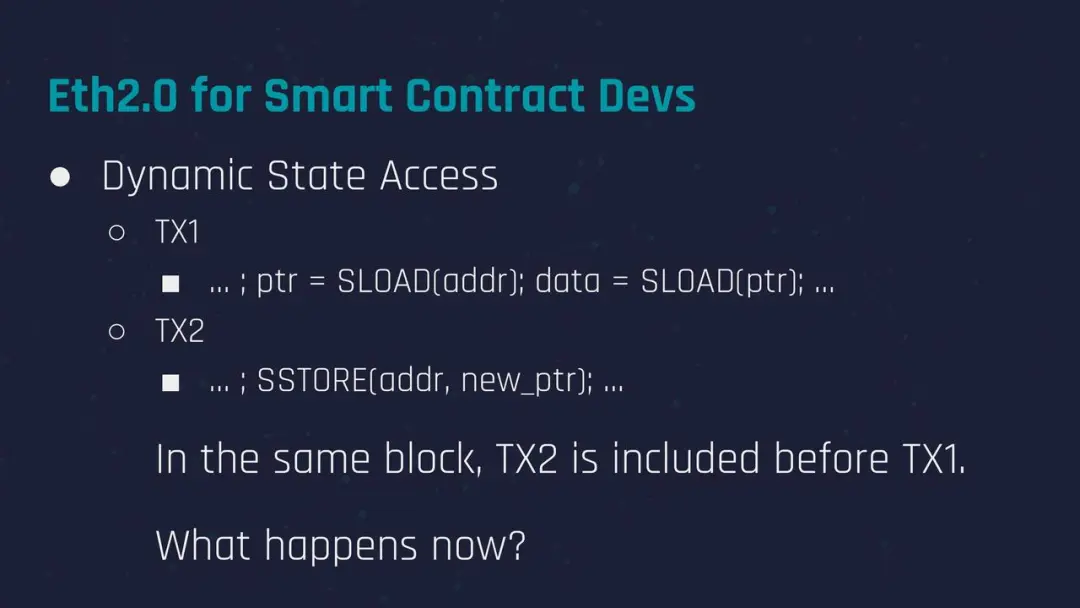
这就引发了两者状态访问模式的比较。静态状态访问的例子是无状态执行,这种模式下,所需的状态信息是附加在交易的见证信息里跟交易一起传播的,这样确定性更强,但这样就会遭遇上述问题;动态访问模式下,交易的打包先后顺序可能会引发问题。






最后,演讲者指出,可扩展性和安全性是 Eth2.0 的终极追求,而相似于 Eth1 的执行模式只是次要目标;并呼吁智能合约开发者放心,问题都可以解决的。





申明:本站所发布文章仅代表个人观点,不代表ChainXiu链嗅网立场。
提示:投资有风险,入市须谨慎。本资讯不作为投资理财建议。
相关推荐
-
干货、黑科技、跨洋连线,2020Cointelegraph中文大湾区·国际区块链周圆满闭幕
8月5日-7日,由Cointelegraph中文和Cointelegraph联合主办的2020“同一个世界,同一个愿景,同一个梦想”大湾区·国际区块链周在深圳大湾区完美收官
评论列表(1条)
Hi there! Do you know if they make any plugins to help with SEO?
I’m trying to get my website to rank for some targeted keywords but I’m not seeing very good results.
If you know of any please share. Kudos! You can read similar text here:
Wool product